Setting up the XBees
Now we need to program the XBee radios. There are several ways to do this. You can program a PLC to do it, you can try to program it through a terminal program, or you can use the XCtu program from Maxstream. I recommend using XCtu.
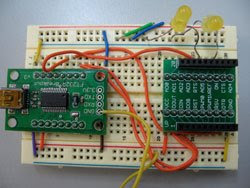
I used the FT232R Breakout board from Sparkfun. You can use FTDI's USB to serial cable, its a little cheaper and just a cable. Solder straight headers to the board. Connect 3.3 to the power strip and the ground to ground. Connect TXD to DIN and RXD to DOUT. Connect RTS to RTS and DTR to DTR. Connect a LED to ON and one to AD5. AD5 can check the mode the radio is in. Connect the board to the USB, note the FT232R needs a mini USB end.
Windows might need some drivers installed. Install them. Open put XCtu and find the COM port that the modem is on. Test to make sure it is there. Download the new firmware.
Click on the modem configuration tag.
Download the then versions of the firmware.
You need to set a network ID- the default is 1111 change it to anything like 2121.
Each modem needs an ID. This is the ATMY configuration. Set one to 1234 and the other to 5678. The modem with MYID 1234, set its destination low to 5678 and visa versa. The destination low tells it which ID it should communicate to. Change the baud rate to whatever baud rate your code is using. Make sure it puts the newest firmware on as well. Click on the write button. In order to access this modems again you need to check on the PC Settings and make sure the baud rate matches.
I used the FT232R Breakout board from Sparkfun. You can use FTDI's USB to serial cable, its a little cheaper and just a cable. Solder straight headers to the board. Connect 3.3 to the power strip and the ground to ground. Connect TXD to DIN and RXD to DOUT. Connect RTS to RTS and DTR to DTR. Connect a LED to ON and one to AD5. AD5 can check the mode the radio is in. Connect the board to the USB, note the FT232R needs a mini USB end.

Windows might need some drivers installed. Install them. Open put XCtu and find the COM port that the modem is on. Test to make sure it is there. Download the new firmware.
Click on the modem configuration tag.
Download the then versions of the firmware.
You need to set a network ID- the default is 1111 change it to anything like 2121.
Each modem needs an ID. This is the ATMY configuration. Set one to 1234 and the other to 5678. The modem with MYID 1234, set its destination low to 5678 and visa versa. The destination low tells it which ID it should communicate to. Change the baud rate to whatever baud rate your code is using. Make sure it puts the newest firmware on as well. Click on the write button. In order to access this modems again you need to check on the PC Settings and make sure the baud rate matches.
posted by Aaron M Cohen at 2:42 PM
0 comments
![]()





